技术文档丨 交通灯感知
作者:HelloDeveloper2019.12.11 06:49浏览量:1917简介:交通灯感知模块旨在使用相机提供准确和全面的交通灯状态信息。通常,交通灯有三种状态,即红、黄、绿。但是,如果交通灯出现故障,它可能会显示黑色或红灯/黄灯闪烁。如果
交通灯感知模块旨在使用相机提供准确和全面的交通灯状态信息。通常,交通灯有三种状态,即红、黄、绿。但是,如果交通灯出现故障,它可能会显示黑色或红灯/黄灯闪烁。如果摄像头的视野中无法找到交通灯,模块将无法识别其状态。
那么,交通灯感知模块是如何在Apollo 2.0中工作的呢?
以下,ENJOY
简介
为了解决交通灯出现故障的不确定情况,交通灯感知模块支持五种状态的输出:
红色
黄色
绿色
黑色
未知
模块反复查询HD-Map(高精地图)以确认车辆前方是否有交通灯。交通灯由其边界上的四个点表示,根据车辆的位置,通过查询HD-Map可以获得交通灯信息。如果车辆前方有交通灯,模块会将它从世界坐标系投射到图像坐标系。
Apollo 认为只使用具有固定视野的单摄像机无法保证看到所有地方的交通灯。局限是由于以下因素引起的:
① 感知范围可能超过100米
② 交通灯的高度或交叉路口的宽度变化很大
因此,Apollo 2.0使用两个相机来扩大感知范围:
安装了一个焦距为25毫米的远距摄像机,用来观察前方远处的交通灯。在长焦相机中捕获的交通灯非常大且易于检测。然而,长焦相机的视野非常有限。如果车道不够直,或者车辆与交通灯比较接近,则交通灯通常将处于图像之外(处于相机视野之外)。

长焦相机检测交通信号灯所获图像
一个广角相机,其焦距为6mm,用于提供足够宽的视野。该模块根据光线投影自适应地选择使用哪个相机。虽然Apollo汽车上只有两个摄像头,但该算法可以处理多个摄像头。

广角相机检测交通信号灯所获图像
流水线
以下将介绍流水线的两个主要组成部分:
Pre-process(预处理阶段)
交通灯投影
相机选择
图像和缓存交通灯的同步
Process(处理阶段)
矫正 - 提供准确的交通灯边界框
识别 - 提供每个边界框的颜色
修订 - 根据时间顺序校正颜色
Pre-process
无需对每一帧图像都进行交通灯检测。因为交通灯变化的频率比较低,并且计算资源也比较有限。通常情况下,来自不同摄像机的图像几乎同时到达,但是只有一张图片会被送到整个流水线的Process部分。因此,图像的选择和匹配就显得十分必要。
输入and输出
本节介绍Pre-process模块的输入和输出。输入可以通过订阅系统中的相关主题名称或直接从本地存储的文件中读取获得,输出则直接给后续的Process模块。
① 输入
• 通过订阅主题名称获得的来自不同相机的图像,例如:
/apollo/sensor/camera/traffic/image_long
/apollo/sensor/camera/traffic/image_short
• 通过查询主题获得的定位信息:
/tf
• 高精地图
• 标定结果
② 输出
• 所选相机拍摄的图片
• 从世界坐标系投射到图像坐标系的交通灯边界框
摄像头选择
交通灯由唯一ID和其边界上的四个点表示,每个点在世界坐标系中被描述为3D点。
以下示例是交通灯signal info的一种典型表示。根据汽车的位置,通过查询HD地图可以获得四个边界点。
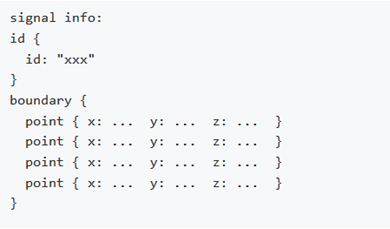
然后将三维世界坐标中的边界点投影到每个相机的二维图像坐标系中。对于一个交通灯而言,由长焦相机图片中四个投影点描述的边界框区域比较大。检测效果优于广角相机图像。因此,可以看到所有交通灯的最长焦距相机的图像将被选为输出图像。投影在此图像上的交通灯边界框将作为边框输出。
带有时间戳的被选中摄像机ID将被缓存到队列中,如下所示:
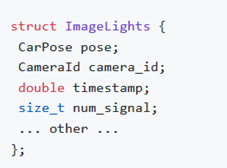
到目前为止,我们需要的所有信息包括定位,标定结果和高精地图。选择过程可以在任何时间点进行,因为投影是独立于图像内容的。在图像到达时执行选择任务仅仅是为了简单起见。此外,不需要在每个图像到达时执行图像选择,可以为设选择设置一个时间间隔。
图像同步
图像到达时带有时间戳和摄像机ID等信息。时间戳和摄像机ID的配对用于查找适当的缓存信息。如果可以找到一个具有相同摄像机ID且时间戳与当前图像时间戳相差很小的缓存记录,则可以将图像发布到“Process”模块。所有不合适的图像都被废弃。
Process
Process模块分为如下三个步骤,每一步聚焦一个任务上
-
矫正 – 在ROI中检测交通灯边框
-
识别 – 对边界框的颜色进行分类
-
修订 - 根据时序信息更正颜色
输入and输出
本节介绍Process阶段的输入和输出数据。输入从Pre-process模块获得,输出将作为交通灯主题发布。
① 输入
• 所选摄像机拍摄的图像
• 一组边框数据
② 输出
• 一组带颜色标签的边框
Rectifier(矫正器)
受标定,定位和高精地图标签的影响,投影位置并不完全可靠。基于交通灯投影位置计算得到的较大感兴趣区域(ROI)将被用于找到更加精确的交通灯边界框。
在下面的照片中,蓝色矩形表示投影交通灯边框,它与实际交通灯的位置还有很大偏差。范围更大的黄色矩形框是ROI。

交通灯检测被当成一个常规卷积神经网络(CNN)检测任务来实现。它接收一个带ROI的图形作为输入,输出一系列边框。ROI中的交通灯可能比输入中的交通灯多。
Apollo需要根据检测分数、输入的交通灯位置和形状来选择合适的交通灯。如果CNN网络无法在ROI中找到任何交通灯,则输入交通灯的状态将标记为未知,并跳过剩余的两个步骤(识别器和修订器)。
交通灯识别被当成一个典型的CNN分类任务实现。该神经网络以一个带ROI的图形和一个边框列表作为输入。具有ROI和边界框列表作为输入的图像。网络的输出一个4*n的向量,表示每个候选框的分别为黑色,红色,黄色和绿色的概率。
有且只有概率足够大时,具有最大概率的类才被视为交通灯的状态。否则, 交通灯的状态将设置为黑色, 这意味着状态不确定。
Recognizer(修订器)
由于红绿灯可能闪烁或被遮挡, 并且识别器不是完美的, 因此当前状态可能无法表示真实状态。一个可以纠正状态的修订器就显得十分必要。
如果修订器收到一个确定的状态 (如红色或绿色), "修订器" 将直接保存并输出该状态。如果接收到的状态为黑色或未知, 则Reviser将查找保存的地图。如果交通灯的状态在一段时间内都是确定, Reviser将输出保存的状态。否则, 黑色或未知的状态将作为输出。
由于时间顺序的影响, 黄灯只存在于绿灯之后和红灯之前。为了安全起见, 红灯之后的任何黄灯都将重置为红灯, 直到绿灯亮起。
相关文章推荐
发表评论
关于作者

- 被阅读数
- 被赞数
- 被收藏数
登录后可评论,请前往 登录 或 注册