进阶课程⑩ | Apollo地图采集方案
作者:啦啦啦小阿龙2020.01.31 07:58浏览量:2317简介:本周阿波君将与大家分享高精地图厂商TomTom的产品,并介绍Apollo的地图采集方案。下面,欢迎开发者紧随阿波君的脚步,进入进阶课程第10期。


上周阿波君为大家详细介绍了「Apollo进阶课程⑨业界的高精地图产品」。
出现在课程中的业界制作高精地图的厂商有Here、MobileEye、Google、Waymo四家。
Here有很好基础优势。作为一家传统图商,他的用户基数可以保证地图以更快的速度和形式更新。
MobileEye更侧重于使用Camera,在图像处理方面也做得更好,使用视觉信息来进行辅助驾驶,是一种基于众包的视觉制图。
谷歌Waymo的技术实力雄厚,其自研的激光雷达据称可以检测到两个足球场(240米)外的物体数据。并且整体的生产成本比Velodyne的64线激光雷达的售价(8万美元)低90%左右,这对于开发者来说是非常诱人的价格。
本周阿波君将与大家分享高精地图厂商TomTom的产品,并介绍Apollo的地图采集方案。下面,欢迎开发者紧随阿波君的脚步,进入进阶课程第10期。
以下,ENJOY

TomTom NV是一家主营业务为地图、导航和GPS设备的荷兰公司,总部位于阿姆斯特丹,在静态地图方面有多年的开发经验。
早在2015年,TomTom的移动测量车队就已实现相当程度的自动化数据采集。
TomTom的移动测量车队通过配备有1台Velodyne激光雷达相机、1台360度全景相机、2台SICK雷达和兼容GPS/GLONASS的高精度天线的福特翼虎,让驾驶员可以独自完成采集任务。
能否保证地图的即时和精准,是衡量一个图商专业性的重要依据。TomTom选择通过前装的方式完成“众包”工作。
在在线路径规划技术方面,TomTom利用云端处理能力,RoadDNA定位方案,快速制定并向车载导航系统发送备用的行驶路径。
集合电动车服务,TomTom还可为驾驶员提供其车辆电量耗尽前所能行驶的距离信息,并为其规划最高效的行驶路径,在恰当的时机提供实用的服务。
RoadDNA的技术原理是通过将原本的3D地图数据转换成2D视图,在对地图数据进行压缩的同时,还能保留道路上的关键要素,进行对比定位。从而达到节省空间,使自动驾驶汽车对道路信息的处理速度更快的目的。
18年11月,TomTom牵手百度推出了全新地图服务AutoStream。
AutoStream是一套针对地图更新机制开发的数据传输软件。车厂开放接口后,车辆可在行驶过程中把其感测到的相关地理信息,通过地图引擎的传输单元上传到云端,AutoStream在编译解读道路数据后再回传给汽车,最终完成高精地图实时更新工作。

百度采取的是激光雷达和Camera二者相结合的制图方案
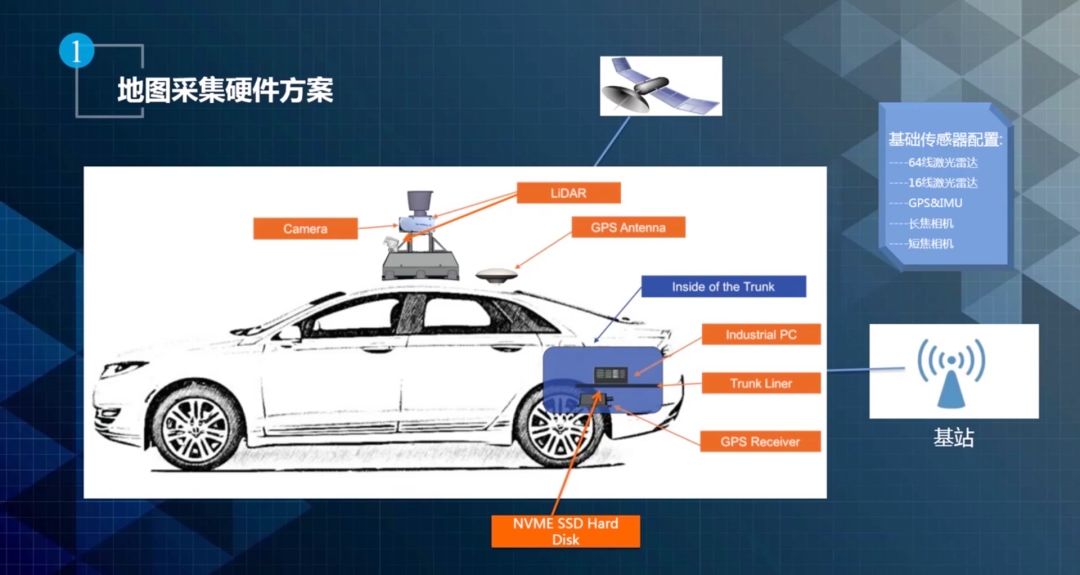
百度在Apollo2.5版本中发布了地图采集方案。

基于Apollo的地图数据采集可以实现一键化
该方案的基础传感器配置有:平装的64线激光雷达,用于道路路面采集。
由于平装的64线激光雷达扫描高度比较低,还需要一个斜向上装的16线激光雷达,用于检测较高处的红绿灯、标牌等信息。
该方案的其他传感器还有GPS、IMU、长焦相机以及短焦相机。
值得一提的是,百度采用的GPS传感器并非一个单纯的GPS,而采用的是RTK的方案。
RTK相较于单纯的GPS,能提供更高的精度。
地面上建立的观测站一般会选择在开阔无遮挡的楼顶,这样能保证观测信号良好。

RTK方案需要建立静态和动态两种观测站点
在RTK方案中,观测站通过长时间在某个位置不断地进行定点观测卫星、观测计算,是一个静态的观测站点。而无人车相当于一个动态的站点,通过车辆移动监测卫星信号。
GPS在传输过程中,可能会受到多径效应、电离层大气层、反射折射等各种元素的影响。但一定范围内的不同基站,受到的影响相对一致。
基于该原理,RTK方案通过观测站之间载波信号的差分就可以得到厘米级的定位效果。
RTK方案需要基站在无遮挡的情况下,才能提供非常准确的位置。
但车辆在城市中行驶,容易受到高楼的遮挡,采集到的数据会受影响。


基于Apollo系统的地图数据采集流程
进行地图采集的两个先决条件:传感器工作状态正常和传感器已被标定。
开发者首先要保证各个传感器处于工作状态。
在Apollo提供的地图采集页面中,左侧有监控传感器状态的图标。
采集过程中,首先要看左侧各个传感器图标的状态,绿色表示状态正常,红色或黄色表示传感器出现问题了。
如果出现状态不对,开发者可以检查传感器的线是否松了,或有其他状况。
其次是保证各个传感器已经被标定过。
Camera内部参数和外部参数不一致,会导致采集的数据不准确,从而作废。
相应的,不同厂家生产的激光雷达,其参数设定也会不一致。
同一厂家生产的激光雷达,参数设定一致时,采集的数据可能有效;不同厂家生产的激光雷达,由于地面点反射值不一样,参数设定不一样,就会导致数据采集出现偏差。
因此,Camera和激光雷达都需要被标定。
在以上两个条件都确认无误之后,就可以打开开关进行地图采集了。
采集过程中,无人车需要双向车道全覆盖3—5遍,最好是5遍。
如果车辆搭载64线激光雷达,那么完成地图采集目标所需要的全覆盖圈数可以减少。
16线激光雷达则需要跑更多圈,才会得到更为精准有效的数据。
Apollo地图采集对车速并无明确要求,但为确保采集效果,时速低于60千米为宜。
Apollo采集路口红绿灯时使用的是Riegl传感器。
在路口采集时,我们并不需要将车停下来进行静态扫描。这种行为本身十分危险并且违反交通法规。
车载Riegl可以保持在正常行驶状态下,就能够采集到路口红绿灯的信息。
一次采集行为完成后,所有的结果会形成数据包。其中包含点云、车辆标定参数、定位结果等信息。

基于Apollo系统的地图数据采集流程
进行地图采集的两个先决条件:传感器工作状态正常和传感器已被标定。
开发者首先要保证各个传感器处于工作状态。
在Apollo提供的地图采集页面中,左侧有监控传感器状态的图标。
采集过程中,首先要看左侧各个传感器图标的状态,绿色表示状态正常,红色或黄色表示传感器出现问题了。
如果出现状态不对,开发者可以检查传感器的线是否松了,或有其他状况。
其次是保证各个传感器已经被标定过。
Camera内部参数和外部参数不一致,会导致采集的数据不准确,从而作废。
相应的,不同厂家生产的激光雷达,其参数设定也会不一致。
同一厂家生产的激光雷达,参数设定一致时,采集的数据可能有效;不同厂家生产的激光雷达,由于地面点反射值不一样,参数设定不一样,就会导致数据采集出现偏差。
因此,Camera和激光雷达都需要被标定。
在以上两个条件都确认无误之后,就可以打开开关进行地图采集了。
采集过程中,无人车需要双向车道全覆盖3—5遍,最好是5遍。
如果车辆搭载64线激光雷达,那么完成地图采集目标所需要的全覆盖圈数可以减少。
16线激光雷达则需要跑更多圈,才会得到更为精准有效的数据。
Apollo地图采集对车速并无明确要求,但为确保采集效果,时速低于60千米为宜。
Apollo采集路口红绿灯时使用的是Riegl传感器。
在路口采集时,我们并不需要将车停下来进行静态扫描。这种行为本身十分危险并且违反交通法规。
车载Riegl可以保持在正常行驶状态下,就能够采集到路口红绿灯的信息。
一次采集行为完成后,所有的结果会形成数据包。其中包含点云、车辆标定参数、定位结果等信息。
相关文章推荐
发表评论
关于作者

- 被阅读数
- 被赞数
- 被收藏数
登录后可评论,请前往 登录 或 注册