进阶课程⑪ | Apollo地图生产技术
2020.01.31 08:22浏览量:2094简介:上周阿波君为大家详细介绍了「Apollo进阶课程⑩Apollo地图采集方案」。上周阿波君为大家详细介绍了「Apollo进阶课程⑩Apollo地图采集方案」。

高精地图是自动驾驶汽车的「千里眼」和「透视镜」。
摄像头、激光雷达、传感器所监测到的范围是有限的。摄像头根据不同的俯角看到的距离约15米-60米不等,激光雷达所看到的范围大约40米-80米范围,而安装了高精地图的自动驾驶汽车,就相当于具备了一双“千里眼”,不但可帮助自动驾驶汽车提前知晓位置信息,还能精确规划行驶路线。
Camera看不清的地方,或者雷达检测不到的地方,高精地图能及时反馈数据,起到一个“透视镜”的作用。
上周阿波君为大家详细介绍了「Apollo进阶课程⑩Apollo地图采集方案」。
Apollo采取的是激光雷达和Camera二者相结合的制图方案。该方案需要配置64线激光雷达、16线激光雷达、GPS、IMU、长焦相机以及短焦相机六大基础传感器。
基于Apollo系统的地图数据采集可以实现一键采集。采集完成之后,Apollo会提供一系列后续的制图服务。
本周阿波君将与大家分享Apollo地图生产技术相关内容。下面,我们一起进入进阶课程第11期。
以下,ENJOY

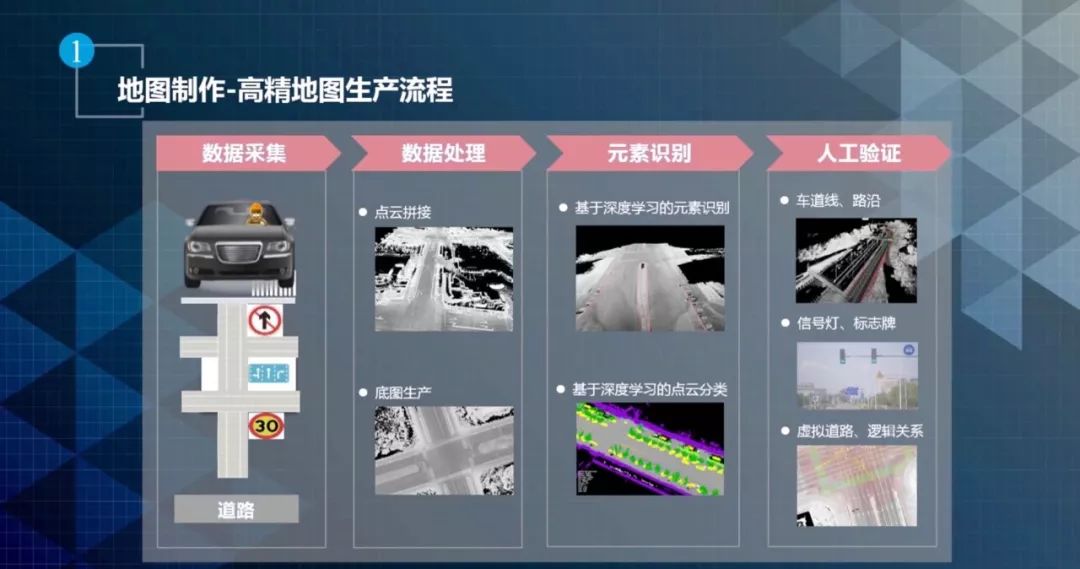
高精地图生产流程
在城市道路环境下,高精地图生产分为数据采集、数据处理、元素识别、人工验证四个环节。

百度采取的是激光雷达和Camera二者相结合的制图方案。
Apollo2.5版本中,百度已经发布了其地图采集方案。
该方案的基础传感器配置有:平装的64线激光雷达和16线激光雷达。
其中,64线激光雷达用于道路路面采集。由于其扫描高度比较低,还需要一个斜向上装的16线激光雷达,用于检测较高处的红绿灯、标牌等信息。
其他传感器有GPS、IMU、长焦相机以及短焦相机。

传感器采集到的数据分为点云和图像两大类。
L4级自动驾驶汽车对地图的精度要求非常高。Apollo在制图过程中处理的数据也以点云为主。
采用RTK的先决条件,即在开阔无遮挡的情况下,才能取得相对准确的信号。
在城市道路中采用RTK方案,由于高楼遮挡或林荫路等场景无法避免,它们仍会对信号的稳定性产生影响。
因此,我们在拿到点云之后需要对其进行拼接处理。
点云拼接:采集过程中出现信号不稳定时,需借助SLAM或其他方案,对Pose进行优化,才能将点云信息拼接,并形成一个完整的点云信息。
反射地图:点云拼接后,可将其压缩成可做标注、高度精确的反射地图,甚至基于反射地图来绘制高清地图。其生产过程与定位地图的制图方式一样。

bai元素识别包括基于深度学习的元素识别和基于深度学习的点云分类。
基于点云压缩成的图像进行车道线的识别,我们可得出准确的车道线级别的道路形状特征。
除此之外,我们还需要提炼道路的虚实线、黄白线、路牌标识等,来完善道路特征。
通过对收集到的图像等进行深度学习,即可提炼出道路相关元素放到高精地图中。
数据采集、数据处理、元素识别三个流程是高精地图自动化的必要环节。不过,从目前来看,自动化仍无法解决所有问题,仍存在信息补齐和逻辑关联的缺陷。
一方面,无人驾驶车辆无法处理没有车道线的道路。这一步需要离线并用人工手段补齐相关信息。
其次,涉及到逻辑信息的处理时,无人车无法判断。例如在某一路口遭遇红绿灯时,车端应该识别哪个交通信号灯,也需要人工手段关联停止线与红绿灯。

人工验证的环节包括识别车道线是否正确、对信号灯、标志牌进行逻辑处理、路口虚拟道路逻辑线的生成等。


通过64线激光雷达采集到的点云信息加上定位信息,拼接得出一个完整的点云效果
百度高精地图依托模式识别、深度学习、三维重建、点云信息处理等世界领先的技术,其数据自动化处理程度已达到90%,相对精度达0.1-0.2米,准确率高达95%以上。
简单的说,采集到的这些每秒 10 帧左右的图像,识别和融合都是自动化的。把 GPS、点云、图像等数据叠加到一起后,将进行道路标线、路沿、路牌、交通标志等等道路元素的识别。
另外,诸如同一条道路上下行双向采集之后造成的数据重复问题,也会在这一步里被自动整合,剔除重复内容。
目前百度对于城市复杂场景及环境的制图效果较好,可以精细刻画上百种道路要素和属性。
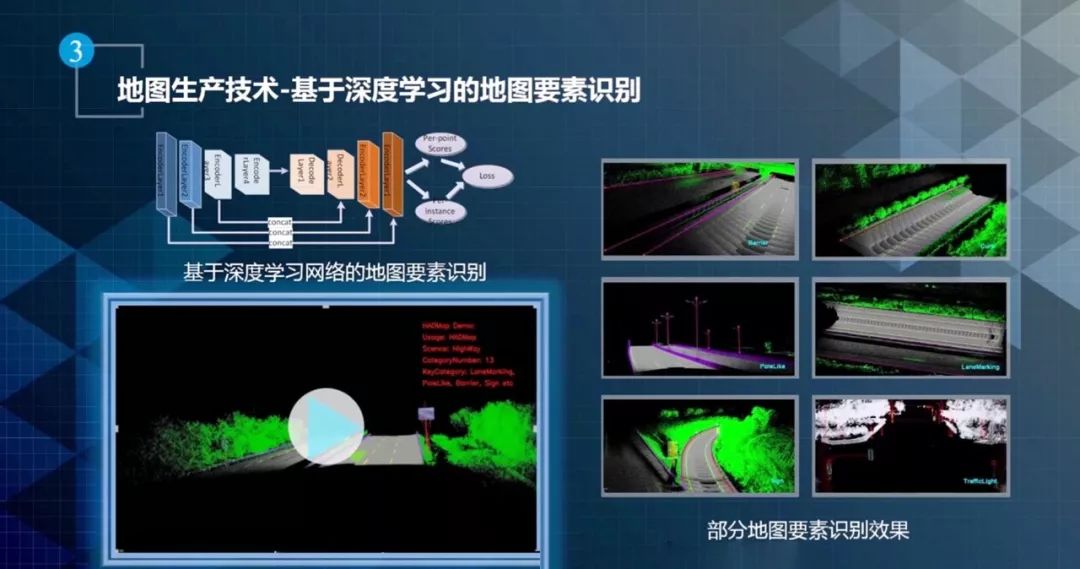
基于深度学习的地图要素识别
地图要素的识别包含两个层面:
第一个层面,能否根据点云分割从中提取精确的Feature。
第二个层面,尝试从点云中提取车道线、灯杆、红绿灯。如灯杆可以用来做视觉定位的Feature。
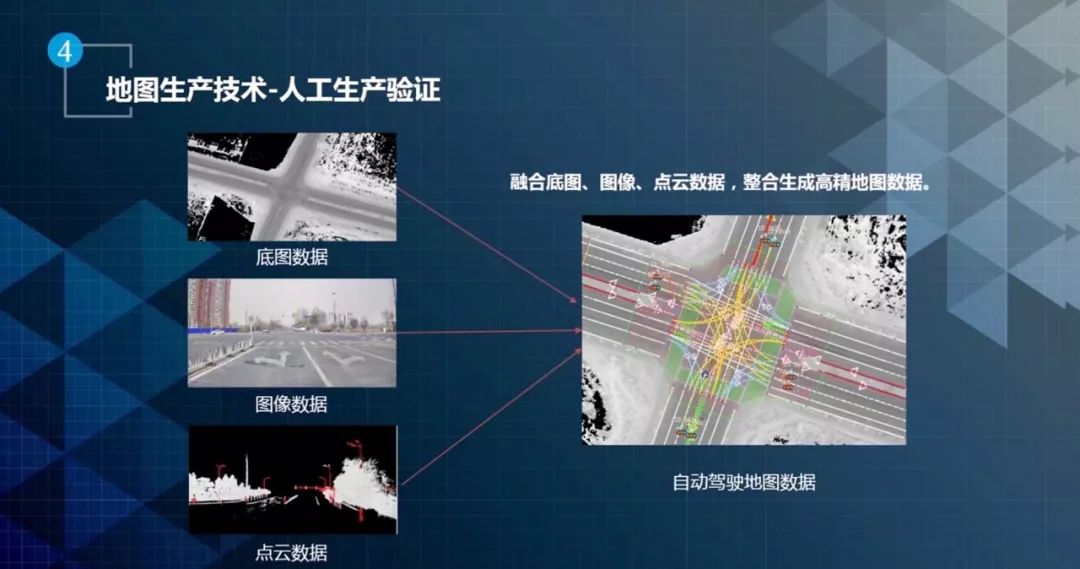
人工生产验证
百度把高精度地图制作分为「外业」和「内业」两部分,共三个步骤,分别是外采、后台数据化处理、人工验证以及发布。
因为自动化处理不可能做到百分之百的准确,所以得再进行一轮人工验证,相当于视频制作的精剪、输出成片阶段。
验证人员需要从云端下载需要验证的路段数据,然后把自动处理之后的高精度地图数据和对应位置的图像信息作比对,找出错误的地方并进行更正。每人/天修正的数据量在 30-50 公里左右。
修正后的数据不会保存在本地,而是需要上传到云端。最终的高精度地图成品,也会通过云平台进行下发。
高精地图是基于反射地图生产的。通过融合底图数据、图像数据、点云数据,整合生成高精地图数据,将可形成一份相对完整精确的自动驾驶地图数据。


Apollo所需的定位地图、高精地图,以及基于高精地图生成的路径规划图和仿真地图
目前Apollo高精地图主要应用在高精定位、环境感知、决策规划、仿真运行四大场景。
定位地图类似于整齐排列的小格子,存储了坐标信息和反射强度信息等,用于点云定位。
点云定位是Apollo中的一个定位方案,在高精地图各个模块都会应用到。
路径规划地图主要用于车道级别规划。
仿真地图主要用于基于高精地图的仿真。

发表评论
登录后可评论,请前往 登录 或 注册