进阶课程 ⑫ | Apollo高精地图
2020.01.31 08:46浏览量:2273简介:本周阿波君将与大家分享Apollo高精地图(高精地图的表征和规范)。下面,我们一起进入进阶课程第12期。

高精地图与普通地图不同,高精地图主要服务于自动驾驶车辆,通过一套独特的导航体系,帮助自动驾驶解决系统性能问题,扩展传感器检测边界。
目前 Apollo 内部高精地图主要应用在高精定位、环境感知、决策规划、仿真运行四大场景,帮助解决林荫道路GPS信号弱、红绿灯定位与感知以及十字路口复杂等导航难题。
上周阿波君为大家详细介绍了「Apollo进阶课程⑪丨Apollo地图生产技术」。
详细讲解了高精地图生产的四个环节:数据采集、数据处理、元素识别、人工验证。通过全自动数据融合加工和基于深度学习的地图要素识别方法,最后进行人工验证生产的全部过程。
本周阿波君将与大家分享Apollo高精地图(高精地图的表征和规范)。下面,我们一起进入进阶课程第12期。
以下,ENJOY

Apollo高精地图能够表征的元素如下图所示,包括道路、路口、交通信号灯、逻辑关系元素以及其他的道路对象元素。
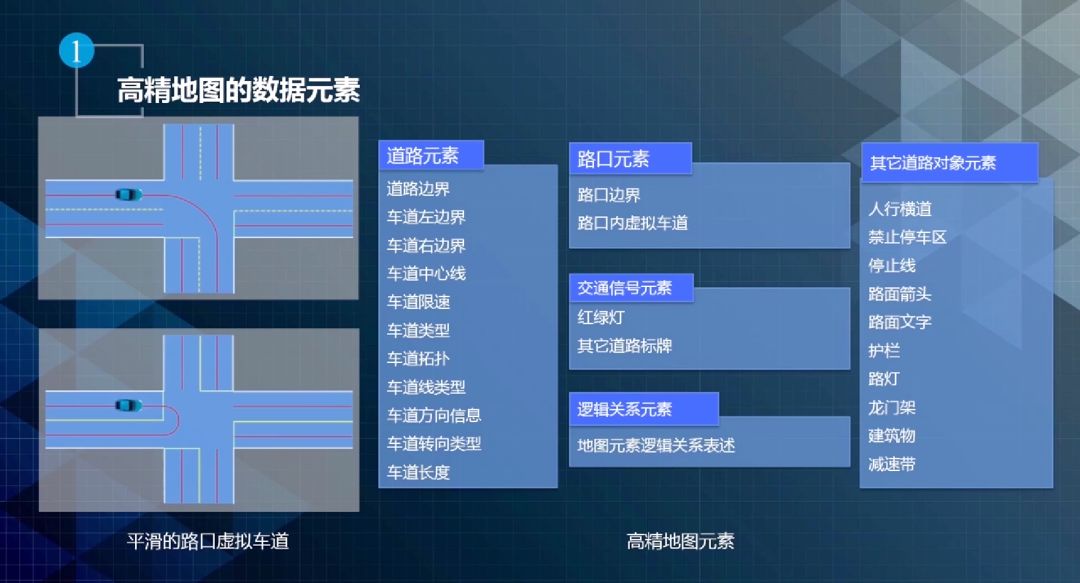
高精地图的数据元素
道路包括左边界右边界。它可分为两个层次,一是道路级别,一是Lane(车道)级别。
每个Lane都有左边、右边界;道路也有道路边界,而且道路边界是强约束,即自动驾驶的时候,道路边界是永远不能压的。
车道线理论上也是不能压的,但是如果在紧急情况下可以压车道线,比如说可以越过虚黄线进行借道超车。
路口是一个相对复杂的场景,可以进一步细分为路口边界和虚拟车道。路口边界主要用于感知。
可以通过路口的边界,对感知进行过滤。如果感知识别到的静态物体不在地图的路口边界之内,就可以暂时忽略它。虚拟车道主要是用来路口的行驶引导。
交通信号灯可以分为红绿灯和其他道路标志。高精地图会为红绿灯提供一个三维空间位置,其次也会提供红绿灯跟车道之间的关联关系,即告知当前所在车道,应该看哪个灯。
道路标志主要包括人行横道,停止线以及一些路上的文字信息。这些信息可以用于各个模块,例如感知、PNC等。
逻辑关系表述。当前,地图中各个元素之间的关系并没有嵌入到元素的表述中,而是使用overlap来表述两个元素之间的关系。
Overlap主要是用来描述两个元素的空间关系。
如下图所示,Lane和Junction在空间上有重叠,它们之间就会有Overlap。

Overlap关系


高精地图的车道模型
上图给出了Apollo的车道模型及其相关描述元素。它与openDRIVE大致的规则是一样的,把纵向切成Section,横向还是使用Lane分割。
该车道模型包含了很多元素属性。其中Left road_sample主要用来描述中心线到两个边界的距离,该边界指的是车道线边界。
Left road sample和Right road sample主要用来表述车道中心线到道路的物理边界的距离。
路口表述:路口分为真实路口和十字路口。在实践过程中,发现除了真实路口之外,在车道数变化的时候,比如从两车道变到三车道,需要感知周围有没有车辆,在Apollo高精地图里面也把这种情况处理成一个路口。
这也是In road和Cross road的区别。

高精地图的Junction模型

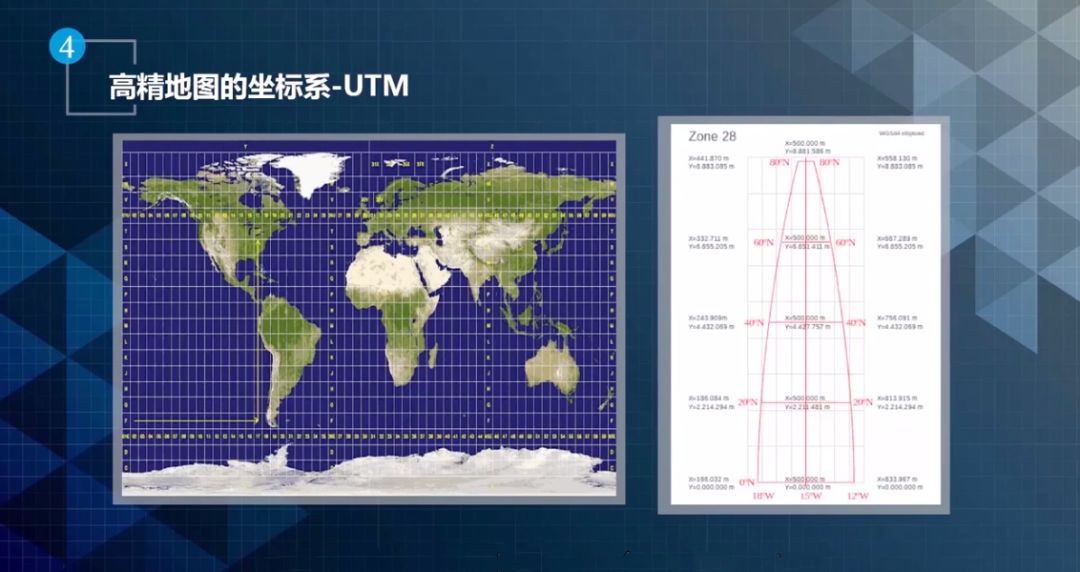
高精地图的UTM坐标系
UTM坐标系把全球分成60个区域带(Zone),每个Zone里面都是相当于Zone中心的一个局部坐标系,如上所示。
UTM坐标系描述的位置十分精确。目前,Apollo内部主要采用UTM坐标系。

84坐标系是一套全球经纬度,也是高精地图里面使用的坐标系。
在该坐标系中,把整个地球想象成是一个椭球,地面的高度是相对于椭球面的一个偏移。高由正数表示,低由负数表示。

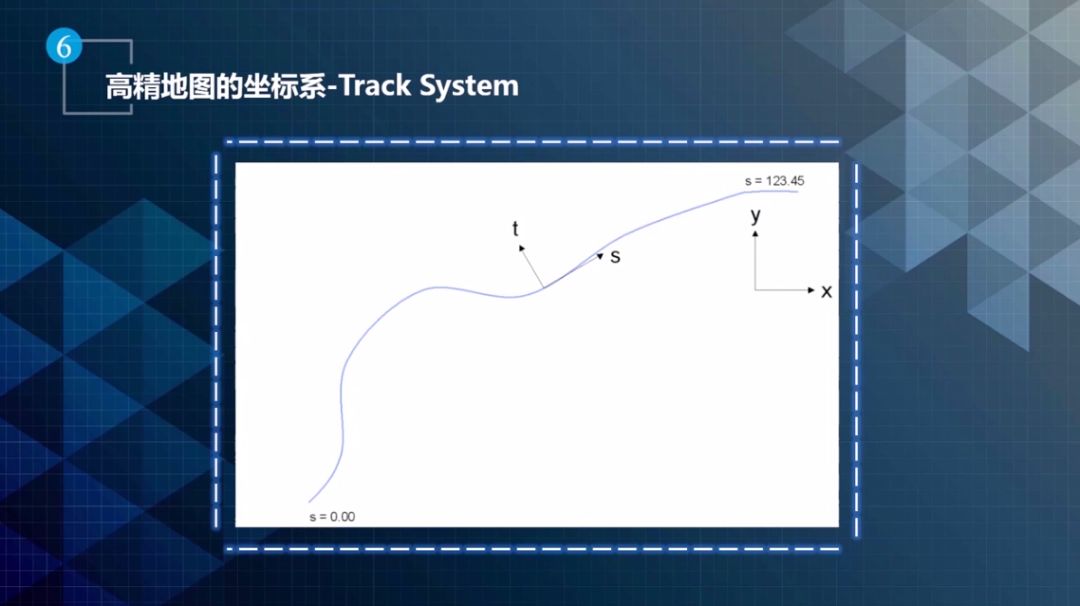
高精地图的Track坐标系
Track坐标系是基于st的,如上图所示。s是纵向,t是横向。这个坐标系用来表述一个元素跟Lane之间关系,描述它位于Lane的什么位置,相对于Lane起点的偏移量是多少。

Apollo OpenDRIVE把所有元素做了归类。
类似于Road和Junction。路上的所有的地面标识都归属为Objects,所有的标牌都归属为Signal,并通过Overlap把它们关联起来,如下图所示。

pollo的OpenDrive规范
Apollo的OpenDRIVE跟标准OpenDRIVE的区别主要有以下四点。
首先,元素形状的表达方式不同。
标准OpenDRIVE是基于参考线加偏移,并采用方程来描述。
Apollo里面的OpenDRIVE,都是坐标点,没有采用方程的方式。采用方程方式的好处在于数据量非常小,通过三四个参数就可以描述一个非常长的线。
采用坐标点的方式,数据量会稍微大一点。但是也有很多的好处。第一,用点表示对于下游的计算非常友好,不需要再重新通过线去做点的采样。
第二,在道路急于转弯的地方,原始的OpenDRIVE把基于Reference Line的方式还原成点的方式,会导致道路上存在毛刺。这种处理方式对于无人驾驶来说非常危险。
一旦道路出现毛刺,就会导致无人驾驶车猛打方向盘,可能直接冲到路边上去。
其次,Apollo对OpenDRIVE进行了元素类型的扩展。比如增加了禁停区,人行横道、减速带等元素的藐视。
第三是增加了一些道路元素关系的表述。比如新增了Junction与Junction内元素的关联关系。
最后还增加了诸如停止线与红绿灯的关联关系,中心线到边界的距离等的描述。


高精地图引擎
HDMAP引擎是Apollo里面用于从HDMAP里面提取相关元素给下游的一个模块。它的结构框图如上图所示。
HDMAP 引擎可以通过ID去检索一个元素,也可以通过空间位置查找元素,比如给定一个点和半径,可以把这个范围之内所有的红绿灯都提出来。

在国内,采集地图属于国家机密事项。并不是任何人都可以做测绘,并不是每一家厂商或者公司都有资格采集地图。
采集地图,必须要经过国家测绘部门/安全部门的审批。
同时,测绘得到的数据需要进行加密。高程、曲率、坡度等在高精地图里面是不允许表述的,但这些数据对于无人驾驶又是必须的。如何在符合国家安全要求和技术需求之间找到平衡,这仍是自动驾驶发展所需要正视、解决的问题。


发表评论
登录后可评论,请前往 登录 或 注册