构建高效的整车系统级别评估平台,百度安全自动驾驶风险安全研究亮相NDSS2022&AutoSec
2022.04.25 02:46浏览量:302简介:构建高效的整车系统级别评估平台,百度安全自动驾驶风险安全研究亮相NDSS2022&AutoSec
4月24日在美国圣地亚哥召开的 Automotive and Autonomous Vehicle Security (AutoSec) Workshop 2022 会议上,百度安全对于自动驾驶风险安全的研究PASS: A System-Driven Evaluation Platform for Autonomous Driving Safety and Security成功入选。在该文章中,百度安全研究员们分享了面向自动驾驶安全研究工作,如何构建高效的整车系系统级别评估平台的相关经验。
AutoSec是近年来在学术界迅速备受关注的新兴研讨会,与安全顶会 NDSS 合办,专注于自动驾驶和智能交通安全。区别于很多安全会议,AutoSec非常重视研究成果在现实世界系统的可行性和影响力,致力于开展对现实世界有推动意义的研究。
众所周知,自动驾驶正在慢慢成为我们日常生活的一部分。随着AI组件在自动驾驶系统中发挥着越来越重要的作用,相关的安全研究工作也受到了关注。目前针对此类工作的评估方法绝大大多使用组件级别的评测,即针对安全研究工作的目标组件(例如目标识别模型、车道线检测模型),对其特定的指标(例如检测率、车道线位置偏差、转向误差)进行评估,以此。现有方法通过对此类指标进行测量,来评估攻击/防御工作对AI组件的影响。由于针对的 AI 组件只是整个自动驾驶系统的一个子集,这种 AI 组件级别的不当行为并不一定会导致自动驾驶系统级别的影响(例如目标识别组件的识别率由于受到攻击而降低并不一定导致车辆驾驶会出现问题)。
百度安全的研究者首先分析了业界最近五5年发表在与 AutoDriveD 密切相关的领域(例如人工智能、安全、计算机视觉、机器学习和机器人技术)针对自动驾驶系统的AI安全工作,大他们都局限在仅对目标组件进行评估。由于对自动驾驶系统其他组件的忽视,导致他们无法准确真实地反应自动驾驶系统到底会受到何种影响。系统级别评估方法的缺失可能会导致相关针对自动驾驶系级的安全风险研究在真实世界中发生错误甚至毫无意义的发展。
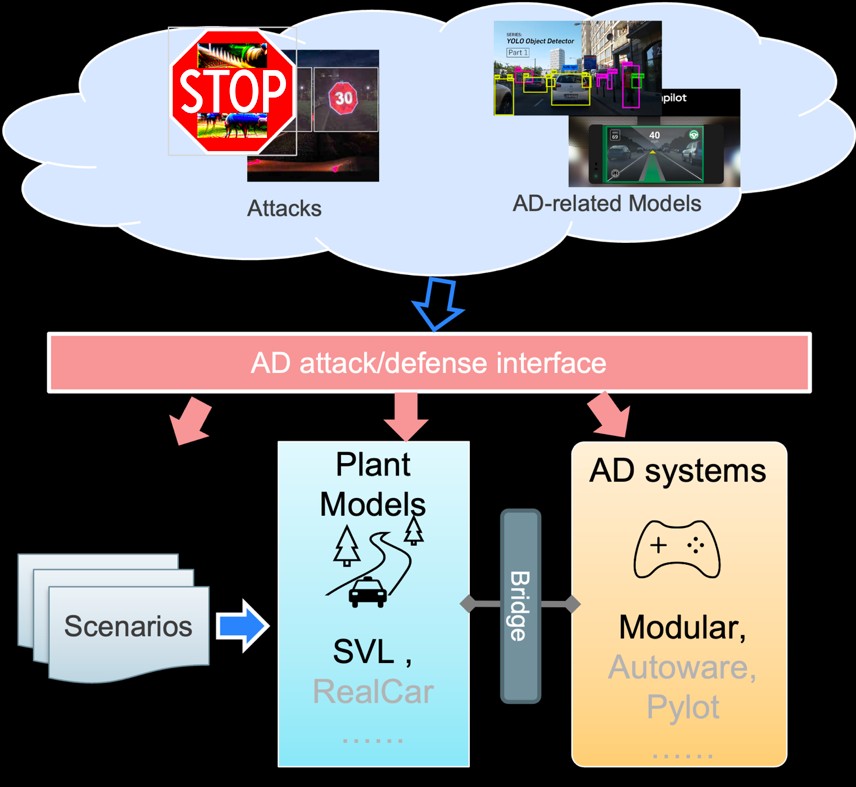
为此,百度百度安全研究员结合近年来举办国际性自动驾驶安全系列赛事(AutoDriving CTF @ BCTF 与 AutoDriving CTF @ DEF CON 29)的经验,提出了一套基于仿真的系统级评估平台。该平台采用模块化设计,整合了3D仿真世界、模块可插拔的自动驾驶系统、标准化的攻击/防御实现接口和统一的系统级别评估指标。对于自动驾驶相关任务的攻击/防御,这个平台提供了一个高效、低成本、公平的评测方案。
百度安全研究员还与参会学者一同讨论了平台后续拓展与开放计划, 获得了大家关于如何扩展接口、社区建设与合作等方面的宝贵反馈意见。百度安全希望通过分享平台的建设经验,助力开发更具现实意义的攻击/防御技术和更安全的自动驾驶系统。


发表评论
登录后可评论,请前往 登录 或 注册