铁马冰河1.0亮相希壤,在元宇宙中创新自动驾驶评测新玩法
2022.06.20 15:10浏览量:1017简介:铁马冰河1.0亮相希壤,在元宇宙中创新自动驾驶评测新玩法
自动驾驶作为AI中备受瞩目的重要落脚点,让人们对未来的敏捷出行充满了幻想。因其“算法驱动硬件”的实现方式,使自动驾驶技术在进化过程中,对路测数据产生了非常强的依赖性。
尽管政府划定了路段可以做路测收集数据,但路测数据量有限和数据的局限性,成为了路测过程中的难点,比如无法满足极端天气和突发路况等多且杂的场景需求。此外,一台自动驾驶测试车往往需要安装数个激光雷达,价格高昂的路测成本无疑为自动驾驶评测带来巨大压力。
如果,把自动驾驶评测放在元宇宙中进行呢?
“铁马冰河”自动驾驶评测平台首创与“希壤”元宇宙平台联动, 虚实结合+沉浸式场景+真人NPC,解锁自动驾驶评测新姿势。

在聊怎么玩之前,不妨先简单介绍下铁马冰河是什么?
铁马冰河自动驾驶评测平台是由百度安全团队自主研发的自动驾驶评测平台。作为一款虚实结合的仿真测试平台,支持软件在环(SIL)、硬件在环(HIL)、整车在环(VIL)的自动驾驶系统和整车测评服务,涵盖了从系统到车机再到整车的全链条测试验证。通过将自动驾驶系统接入铁马冰河自动驾驶评测平台,帮助客户从关键防护环节入手,验证自动驾驶安全防护体系。
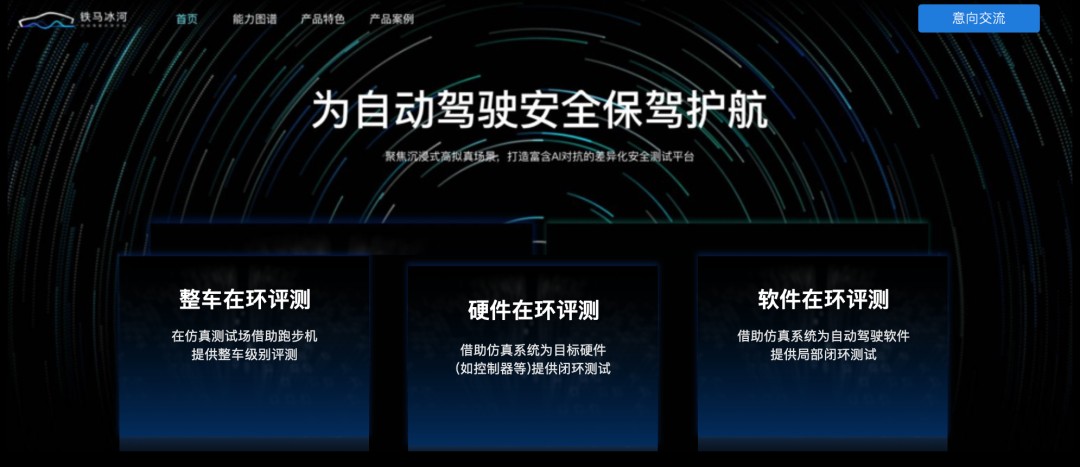
整车在环:在仿真环境中对真实车辆进行自动驾驶功能沉浸式测试,通过仿真平台模拟道路、交通场景以及传感器信号,从而构成完整车辆测试闭环。帮助客户测评整车级别自动驾驶安全性,贴合驾驶员驾驶场景检测未知威胁。

⬆️ 通过汽车“跑步机”模拟物理世界真实路况
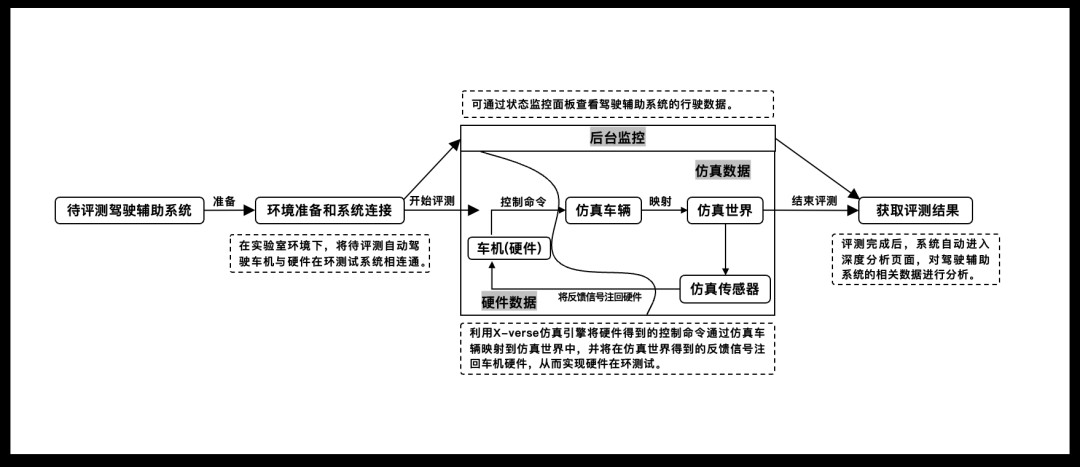
硬件在环:通过测试硬件在仿真环境中对控制命令的反馈,实现硬件在环测试。帮助客户在台架试验和道路试验前对自动驾驶和辅助驾驶系统功能进行验证,缩短控制器开发周期。
软件在环:通过将软件形态的自动驾驶系统与X-verse仿真引擎结合,将仿真系统生成的测试数据输入至测试系统中,满足客户低成本、高拟真度的软件测试需求。
铁马冰河采用基于“希壤”元宇宙能力自研的X- Verse仿真引擎, 将系统/硬件/整车得到的控制命令通过仿真车辆映射到仿真世界中,并将在仿真世界得到的反馈信号注回测试目标,从而实现在环测试,满足用户低成本、高拟真度的路测需求。
X-Verse仿真引擎可贴合用户需求自定义构建仿真场景。帮助用户创建基于法律法规、corner case等维度的高拟真路侧场景,同时为用户提供仿真测试场景的智能fuzzing能力,用户可以根据测试需求加入多种天气泛化元素或安全对抗攻击元素,有针对性地对自动驾驶系统或整车的自动驾驶性能进行安全测试。
在元宇宙中实现自动驾驶评测新姿势
在未来的元宇宙世界中,希壤世界的玩家与合作伙伴可作为真人NPC出现在仿真场景中,更好地捕捉和反馈出自动驾驶汽车在遇到人为的突发情况或者与行人进行碰撞测试时的实际效果,创造更接近真实路测的随机状况,赋予测试场景更多的想象空间。
此次铁马冰河与元宇宙的结合,将被测车辆通过铁马冰河仿真平台映射到希壤元宇宙空间中,被测车辆在仿真环境中的评测过程将与希壤同步,希壤用户可以在仿真环境中实时观察并作为真人NPC参与自动驾驶车辆的评测过程。同时,希壤用户也可选择搭载自动驾驶车辆在元宇宙中巡游。
安全对抗样本丰富仿真测试场景
铁马冰河对于自动驾驶视觉感知评测场景的又一创新,是将百度安全在安全对抗方面积累的研究成果用于仿真路测场景中,模拟出多种安全对抗元素,将“隐身衣”、 “一叶障目”等经典对抗样本在路测场景中模拟出来。通过对场景中的交通标识牌、车身等标志物进行“攻击”,测试自动驾驶的视觉感知模块的鲁棒性。
隐身衣:现实场景中当车辆张贴某种“花纹”图案,会使车辆在目标检测中“隐身”,从而识别不到前方车辆导致车辆碰撞。
一叶障目:现实场景中当车辆张贴某种“花纹”图案,会使车辆在目标检测中“隐身”,从而识别不到前方车辆导致车辆碰撞。
指鹿为马:在交通标志牌如“停”等增加“对抗花纹”扰动,从而使目标检测模型对标志牌误检或漏检。

⬆️ 在仿真 场景中加入对“停”交通标志牌的扰动攻击
此外,铁马冰河的仿真测试能力已经助力小度助手完成智能座舱的模拟路测。在自动驾驶这条路上,未来还有许多技术难关需要攻克。在攻关过程中,铁马冰河自动驾驶评测平台将集成百度安全在自动驾驶安全领域的研究能力,持续打磨安全评测能力的同时,与元宇宙平台深度结合,为自动驾驶的发展助力。

发表评论
登录后可评论,请前往 登录 或 注册