技术文档丨Apollo快速入门指南
2019.12.04 00:55浏览量:2374简介:本指南是在汽车上运行,升级后的Apollo平台的软、硬件用户手册。刚接触Apollo的开发者可以收藏学习。 Apollo升级版本的快速入门指南
本指南是在汽车上运行,升级后的Apollo平台的软、硬件用户手册。刚接触Apollo的开发者可以收藏学习。
Apollo升级版本的快速入门指南主要关注新增加的特性。对于Apollo通用概念,请参阅《Apollo 1.0快速入门》。
以下,ENJOY
一、内容
标定指南
硬件和软件安装
Dreamview 功能对照表
车载测试
标定指南
在进行车载测试时, 请务必确保所有的传感器都已经标定好。有关传感器标定,请您先参阅《Apollo 2.0传感器标定指南》。
硬件和软件安装
关于硬件组件和软件系统的安装说明,请参考《Apollo 3.5硬件和系统安装指南》以及《Apollo软件概述》。
Dreamview功能对照表
关于Dreamview图标的相关问题,请参考《Dreamview Usage Table》。
二、车载测试
1. 将外接硬盘插入主机的USB端口。
2. 启动汽车,然后启动主机电脑。
3. 启动对应的Docker容器。
4. 启动DreamView。
注意:使用您最喜爱的浏览器访问Dreamview Web服务地址:http://localhost:8888。如果一切顺利,会弹出如下界面。
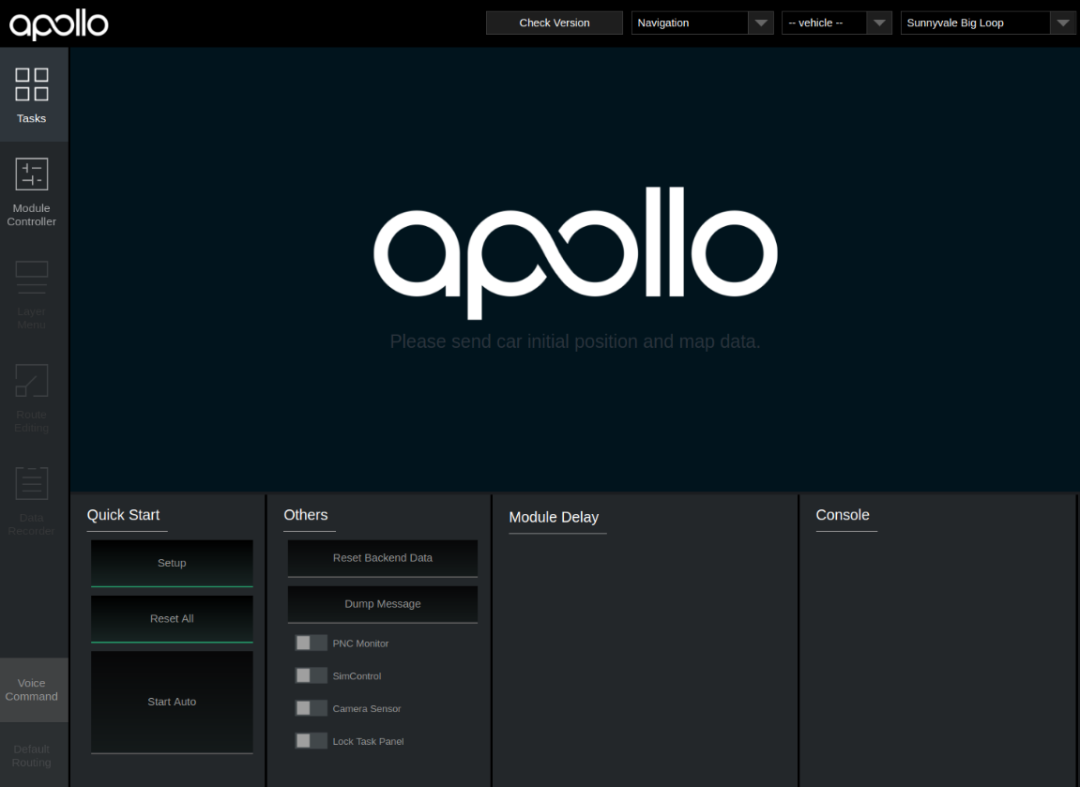
5. 在弹出的Dreamview界面中选择模式、汽车和地图。

注意:在进行任何操作之前,您需要设置配置文件,点击下拉菜单,分别选择 Navigation模式、您想使用的车辆和the HDMap(高精地图)。这些列表选项已经在《HMI配置文件》中定义。
注意:也可以通过HMI(人机接口)右边面板的控件改变配置选项,但是请在修改之后点击右下角的Reset All按钮重启系统。
6. 启动模块。
点击Setup按钮,如下图所示。

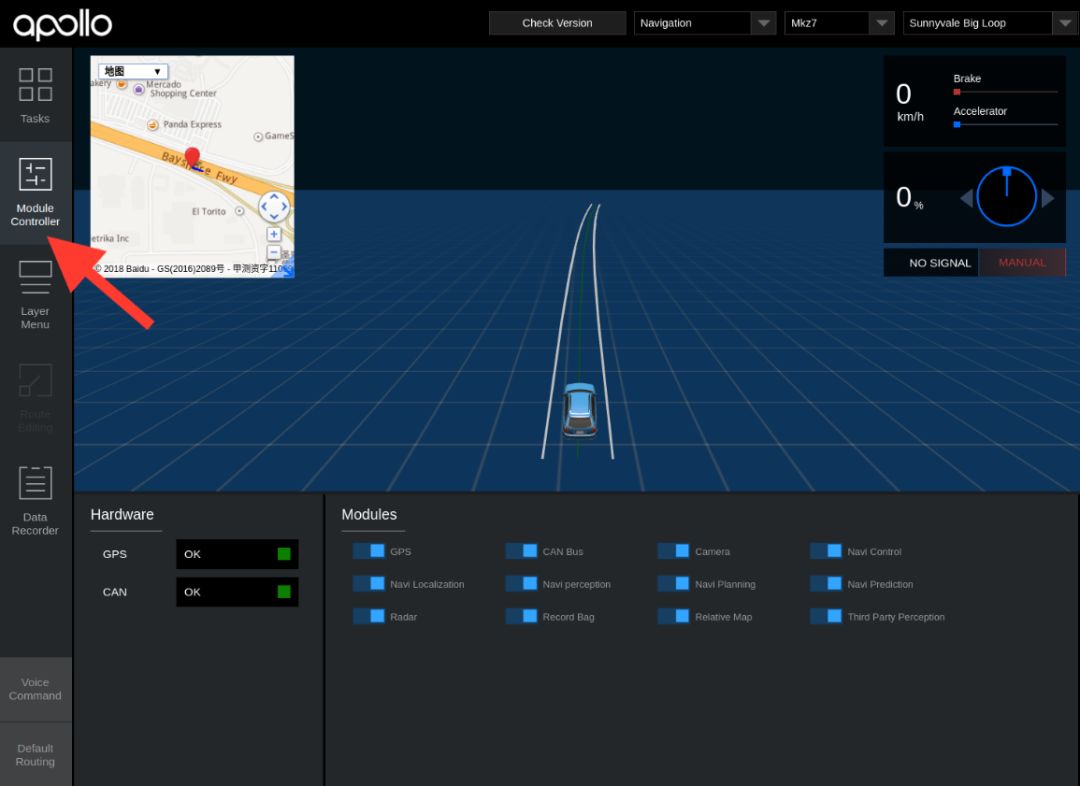
切换到Module Controller视图,检查是否所有的模块和硬件都已经准备就绪。(注意:在离线环境下,诸如GPS、CANBus、Velodyne、Camera and Radar等硬件模块是不能使用的。)( 注意:您可能需要驾驶汽车行驶一段距离以获得良好的GPS信号。)
7. 在Default Routing视图下选择您期望的路由算法。
8. 在Tasks视图下点击Start Auto按钮。(注意:您现在应该已处于自动驾驶模式,请小心。)

9. 在自动驾驶测试结束之后,切换到Tasks视图并点击Reset All按钮,关闭所有窗口,然后关机。
10. 卸下外接硬盘。
*《Apollo 1.0快速入门》
https://github.com/ApolloAuto/apollo/blob/master/docs/quickstart/apollo_1_0_quick_start.md
*《Apollo 2.0传感器标定指南》
https://github.com/ApolloAuto/apollo/blob/master/docs/quickstart/apollo_2_0_sensor_calibration_guide.md
*《Dreamview Usage Table》
https://github.com/ApolloAuto/apollo/blob/master/docs/specs/dreamview_usage_table.md
*《HMI配置文件》
https://github.com/ApolloAuto/apollo/tree/master/modules/dreamview/conf/hmi_modes

发表评论
登录后可评论,请前往 登录 或 注册